谷歌的3D城市点云模型计算需要用到算法,而下面我们就讲其中的关于创造点云的方法。
创造点云
现在我们已经有了每个像素的深度信息,我们需要创建点云同时将每一个点还原至之前获得的全景图片的色彩。
考虑到 npoints =w∗h points,我们定义2个npoints ∗3 漂浮阵列包含了3D空间位置和每个点的色彩。
现在,我们必须考虑全景图片中的一点本来来一个球星图片,所以我们必须使用下列公式将其重新投射到空间中:

注意,除了重新投射,在2D中还原像素的位置也是必要的,因为你需要从彩色全景图片中获得色彩信息,因为全景图片的分辨率是不同的。
 未来VR世界看房是这么看的
未来VR世界看房是这么看的 美国运用AR技术来管理城市
美国运用AR技术来管理城市 Tvori体验版正式上线 VR动画创作工具
Tvori体验版正式上线 VR动画创作工具 VR是怎么欺骗我们的大脑的
VR是怎么欺骗我们的大脑的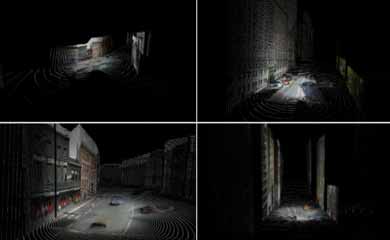 谷歌街景数据制作3D城市点云模型算法评估
谷歌街景数据制作3D城市点云模型算法评估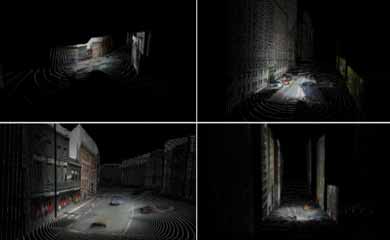 谷歌3D城市点云模型合成点云方法
谷歌3D城市点云模型合成点云方法

 湘公网安备 43011102000836号
湘公网安备 43011102000836号
网友评论